友情提示点击顶部放大镜 可以使用站内搜索 记住我们的地址 www.hainabaike.com
喵星人对于激光发射器发出的光点有着天生、难以抗拒的执着。它们就像一个个职业杀手一样直接的扑向那个小小的红色激光点。对于猫咪们来说狩猎是一项很好的运动。看着萌宠们发起攻击的样子,作为铲屎官的你会不会觉得是一件饶有兴趣的事情呢!通常你只要拿起你的激光发射器就可以做到,但是你总会预先知道激光点的方向。让我们给这个游戏制造一些混乱元素——可以平面移动或改变仰角的激光炮塔,并让它可以周期性地随机移动。先看看下面的视频~
第一步:准备项目组件清单
它需要用你惯用的任何舵机来配合驱动塔楼。这里有两种方案:
RobotGeek 云台:
如果你喜好添加一个摄像头或者附加一个的自带钓鱼杆的逗猫玩具,这款将是一个好的选择。
- RobotGeek云台和舵机
- 镭射激光发射器和固定配件
- Geekduino或者其他兼容Arduino UNO 开发板
- 传感器模块 (推荐,可简化接线)
- 7V 5A 电源
Mini 云台:
不错的低成本选择, 但是9G 的舵机输出的力量有限。
- Mini 云台套件
- 9G 舵机 x 2
- 镭射激光发射器和固定配件
- Geekduino或者其他兼容Arduino UNO 开发板
- 传感器模块 (推荐,可使简化接线)
- 6V 2A电源
第二步:组装炮塔
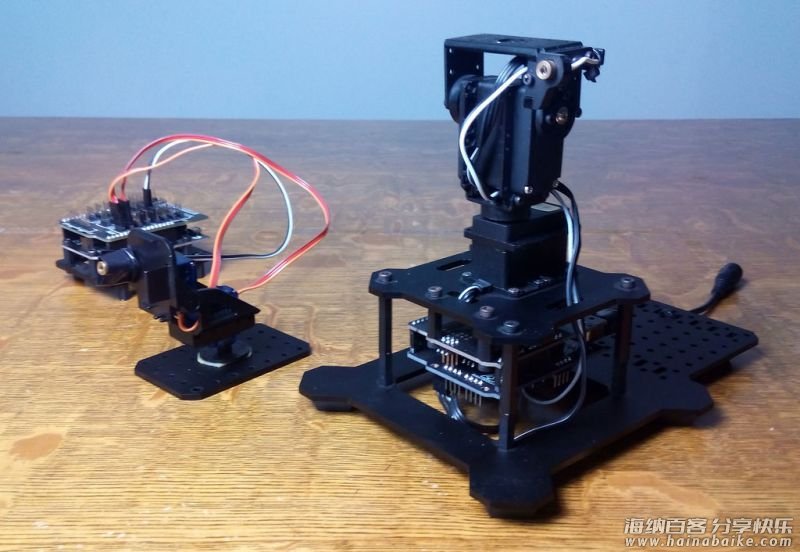
如果你使用的是RobotGeek云台,安装说明可以在这找到。
如果你使用的是Mini云台, 安装说明可以在这找到。
拿上激光发射器,让我们把它连接起来。
第三步:接线
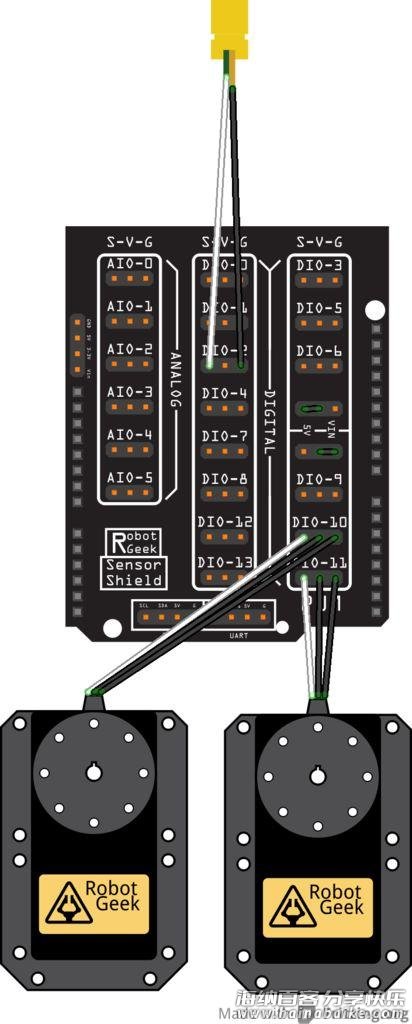
| 设备 | 引脚类型 | 引脚编号 |
| 平移舵机 | 数字 | 10 |
| 仰角舵机 | 数字 | 11 |
| 激光发射器 | 数字 | 2 |
确保设定的输入电压能供更大的伺服7v运行。对于9G的伺服系统,你可以用5V或6V的电源。真的是超级简单的接线。赶紧编码起来吧!
第四步:编程
上传以下代码到你的 Arduino 主板上。
//https://github.com/robotgeek/desktopRoboTurretV3/tree/master/roboTurret3_lazerDazer
//Includes
#include <Servo.h> //include the servo library for working with servo objects
//Defines
const int PAN = 10; //Pan Servo Digital Pin
const int TILT = 11; //Tilt Servo Digital Pin
const int LASER = 2; //Laser Digital Pin
const int PAN_MIN = 40; // minimum pan servo range, value should be between 0 and 180 and lower than PAN_MAX
const int PAN_MAX = 140; // maximum pan servo range, value should be between 0 and 180 and more than PAN_MIN
const int TILT_MIN = 60; // minimum tilt servo range, value should be between 0 and 180 and lower than TILT_MAX
const int TILT_MAX = 100; // maximum tilt servo range, value should be between 0 and 180 and more than TILT_MIN
const int SPEED_MIN = 10; // minimum interpolation speed (less than 5 not recommended)
const int SPEED_MAX = 10; // maximum interpolation speed (Lower SPEED_MAX values mean that the program will cycle more quickly, leading to an increased occurance of pausing. Adjust ROLL_MAX accordingly)
const int ROLL_MAX = 40; // Roll the dice for random pause. Lower value = more frequent pauses, higher value = less frequent pauses
const int PAUSE_MIN = 500; // define minimum pause length in mS. 1000 = 1 second
const int PAUSE_MAX = 1500; // define maximum pause length in mS.
Servo panServo, tiltServo; // create servo objects to control the pan and tilt servos
long dazer_speed;
int dazer_pause_roll;
int pause_length = 1;
int panValue = 90; //current positional value being sent to the pan servo.
int tiltValue = 90; //current positional value being sent to the tilt servo.
byte pan_goal;
byte tilt_goal;
//State Variables
int laserState = LOW; //The current state of the laser module
//Timing variables
long lastDebounceTime = 0; // the last time the output pin was toggled. This variable is a 'long' because it may need to hold many milliseconds, and a 'long' will afford more space than an 'int'
int debounceDelay = 50; // the amount of time that that a button must be held, for a reading to register (in milliseconds)
void setup()
{
//initialize servos
panServo.attach(PAN); // attaches/activates the pan servo on pin PAN
tiltServo.attach(TILT); // attaches/activates the tilt servo on pin TILT
//initalize digital pins
pinMode(LASER, OUTPUT); //set the LASER Pin to an output
//write initial servo positions to set the servos to 'home'
panServo.write(panValue); //sets the pan servo position to the default 'home' value
tiltServo.write(tiltValue);//sets the tilt servo position to the default 'home' value
randomSeed(analogRead(0)); //set a basis for the random() engine, based off of analog0 which will be a random number because nothing is attached
digitalWrite(LASER, HIGH);
}
void loop()
{
dazer_pause_roll = random(1, ROLL_MAX); //pick a random number between 1 and ROLL_MAX
pause_length = random(PAUSE_MIN, PAUSE_MAX); //pick a random number between PAUSE_MIN and PAUSE_MAX
delay(pause_length); //use the random number to pause for pause_length milliseconds
pan_goal = random(PAN_MIN, PAN_MAX);
tilt_goal = random(TILT_MIN, TILT_MAX);
dazer_speed = random(SPEED_MIN, SPEED_MAX);
//perfom the loop while the current positions are different from the goal positions
//if the pan_goal is larger than the pan position, move the pan position up
if (pan_goal > panValue)
{
panValue = panValue++;
}
//if the pan_goal is smaller than the pan position, move the pan position down
else if (pan_goal < panValue)
{
panValue = panValue--;
}
//if the tilt_goal is larger than the tilt position, move the pan position up
if (tilt_goal > tiltValue)
{
tiltValue = tiltValue++;
}
//if the tilt_goal is smaller than the tilt position, move the pan position down
else if (tilt_goal < tiltValue)
{
tiltValue = tiltValue--;
}
panServo.write(pan_goal); // sets the servo position according to the scaled value
tiltServo.write(tilt_goal); // sets the servo position according to the scaled value
delay(dazer_speed); // waits for a random delay before the next loop
} //end loop()
把你的猫咪萌宠抓过来,开启它吧!(当然是开启你的塔楼啦,而不是你的猫咪啦!)你的萌宠可是自带电源的哦!可不要尝试给你的猫咪充电哦!
第五步:Done!就是这么完美!
现在铲屎的你只需坐下来,看着你的猫咪追逐和攻击那个“邪恶”的小红点啦!
via



文章来源:
Arduino 实验室
版权声明:本站资源来自互联网收集,仅供用于学习和交流,请遵循相关法律法规,本站一切资源不代表本站立场,如有侵权、后门、不妥请联系本站删除。






评论列表