友情提示点击顶部放大镜 可以使用站内搜索 记住我们的地址 www.hainabaike.com

01 概述
工业树莓派(RevPi)是一种 DIN 导轨安装的工业小型控件,具有一整套 IO 和总线模块,可以与所有常见的模拟和数字传感器、执行器和总线系统以及基于 TCP-IP 的网络进行通信。RevPi 运行 Linux 操作系统,这使得它成为一个功能多样的多功能解决方案。
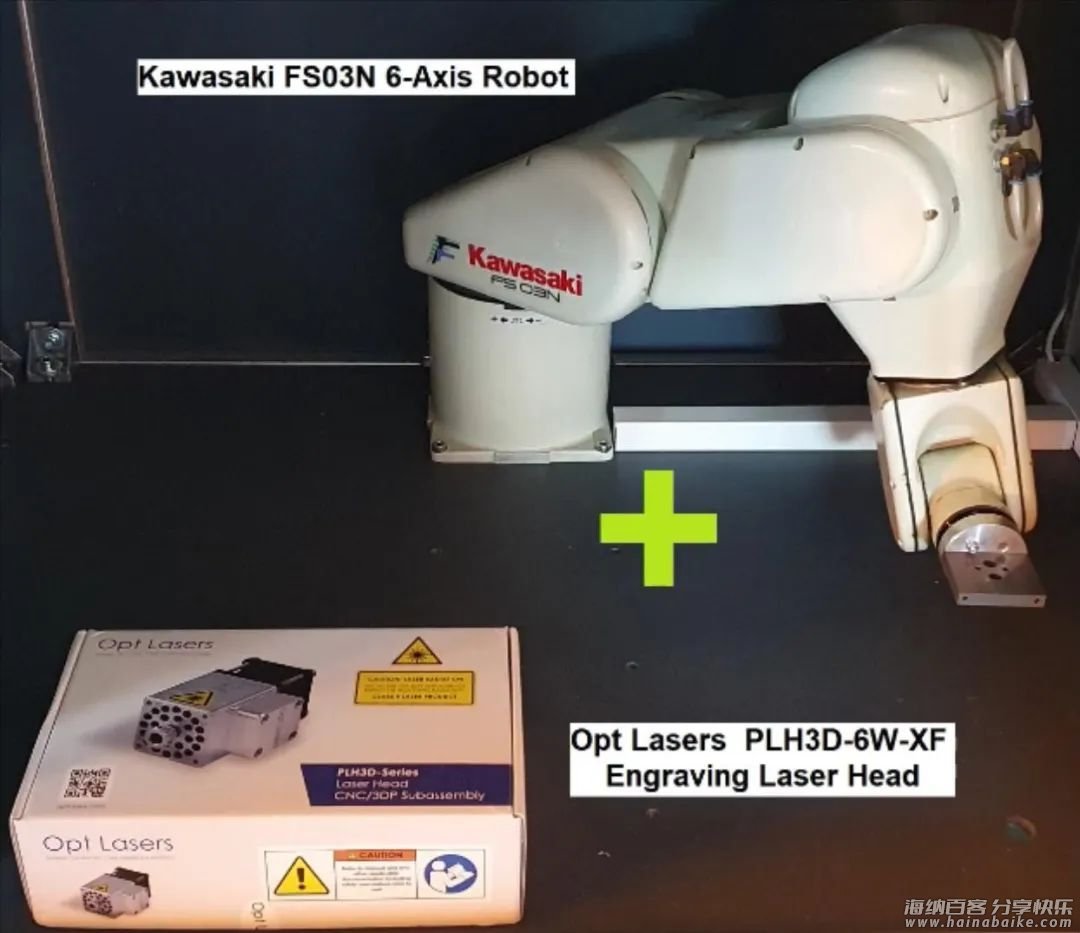
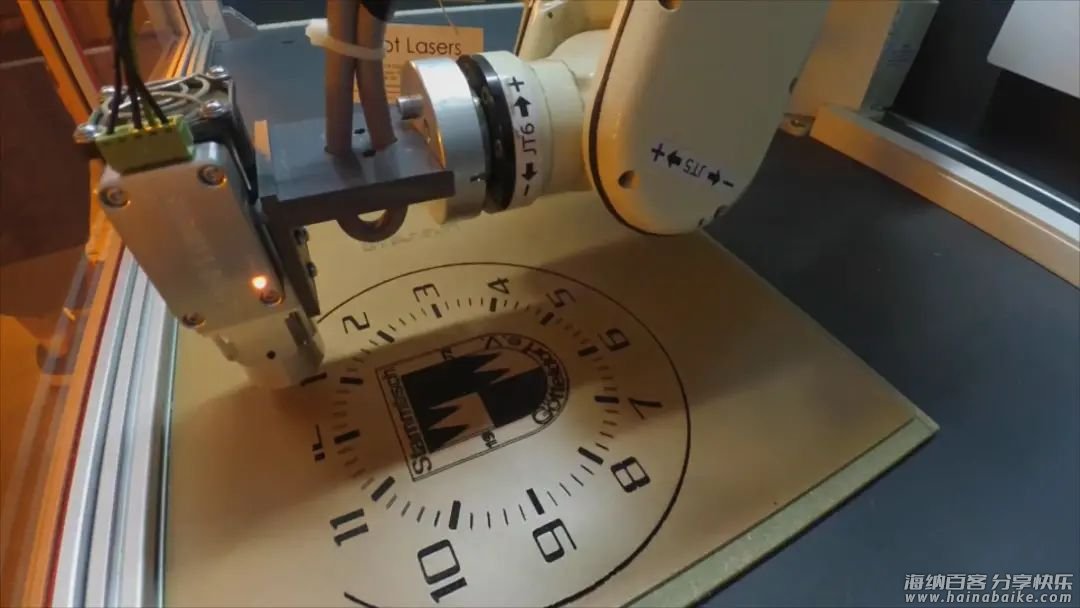
在本案例中,RevPi通过DIO扩展模块连接川崎FS03N型机器人以及PLH3D-6W-XF激光雕刻头。通过预安装的开源Node-RED软件,建立逻辑控制、通信通道以及功能强大的仪表盘。并可以通过web界面对机器人运行状态进行远程访问及控制。
02 硬件连接
下图是本案例的硬件连接实物图。最左边是24V电源,用于设备供电。旁边是RevPi Core模块,并连接了DIO扩展模块。
Core模块通过网线接入到网络内,可以进行远程访问及通信。DIO模块连接机器人及激光雕刻头进行逻辑控制。再往右边是两个AllDAQ的适配器,用于将RevPi DIO扩展模块的14个数字输入和14个数字输出连接到机器人的I/O版。
旁边蓝色的小型设备是一个耦合继电器,用于打开或关闭激光雕刻头的电源。最右边是数模转换器,可以将来自机器人的数字信号转换为激光雕刻头的0-10V模拟信号。

03 Node-RED仪表盘
本案例使用Node-RED的Dashboard组件建立操作仪表盘可以监视机器人的工作状态并进行开关控制。因为Core模块已接入以太网中,所以除了通过IO接口外,也可以TCP或UDP通信进行控制。
在本案例中,通过切换机器人控制器上的开关,可以使得机器人的状态从TEACH模式变为REPEAT模式,并在仪表盘中显示。
点击仪表盘上的Motor Power按钮可以打开电动机电源,并转换为ON状态。
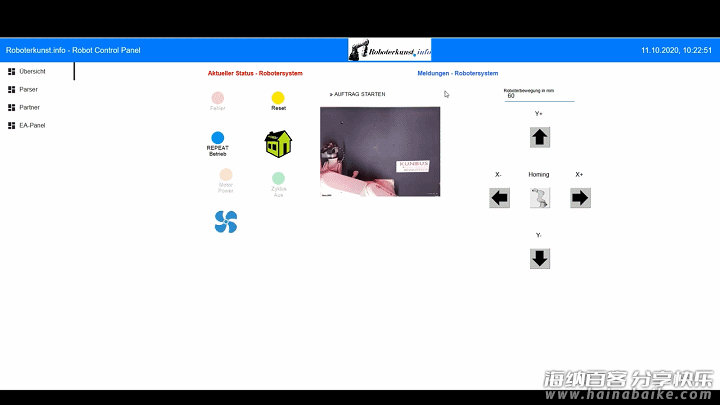
也可以通过仪表盘控制机器人在某个方向上进行移动(以毫米为单位)。
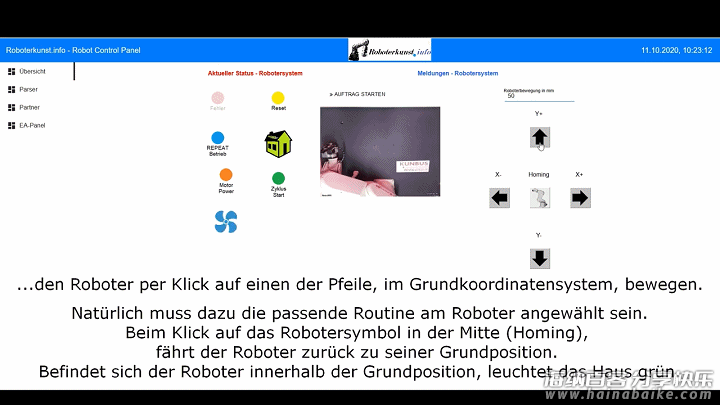
单击中间Homing符号,可以使机器人回到原始位置。如果机器人处于原位,则“房子”符合将点亮。
04 Node-RED程序流
RevPi对机器人的逻辑控制及通信都是通过建立Node-RED flow实现的。
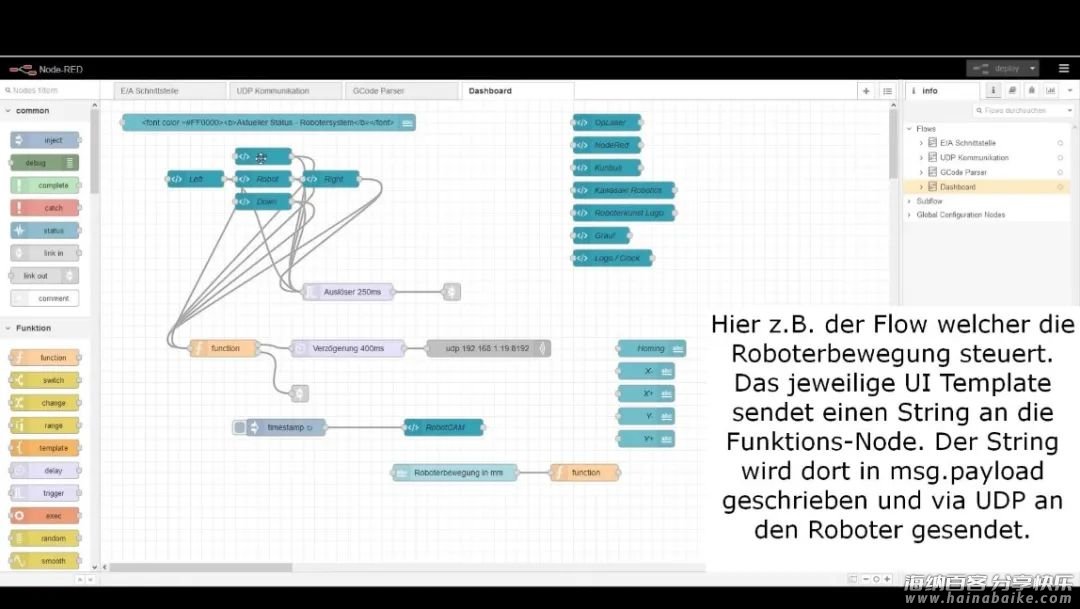
上面介绍的UI界面,也是通过这样的流程建立的。在Node-RED flow中,字符串以msg的形式存在,有效信息位于payload中,并可以通过TCP 或者UDP发送到机器人。
05 远程监控
Node-RED支持通过局域网内基于web的浏览器访问仪表盘。所以,您可以使用平板电脑或者智能手机监视机器人状态并进行控制。

在本案例中,可以通过手机发送开始“Laser-Auftrag gestartet”(开始激光工作)的信息,使机器人开始工作。并在作业结束后,可以在手机端收到“Laser-Auftrag beendet”(激光作业已完成)的提示信息。
06 附录
RevPi简介

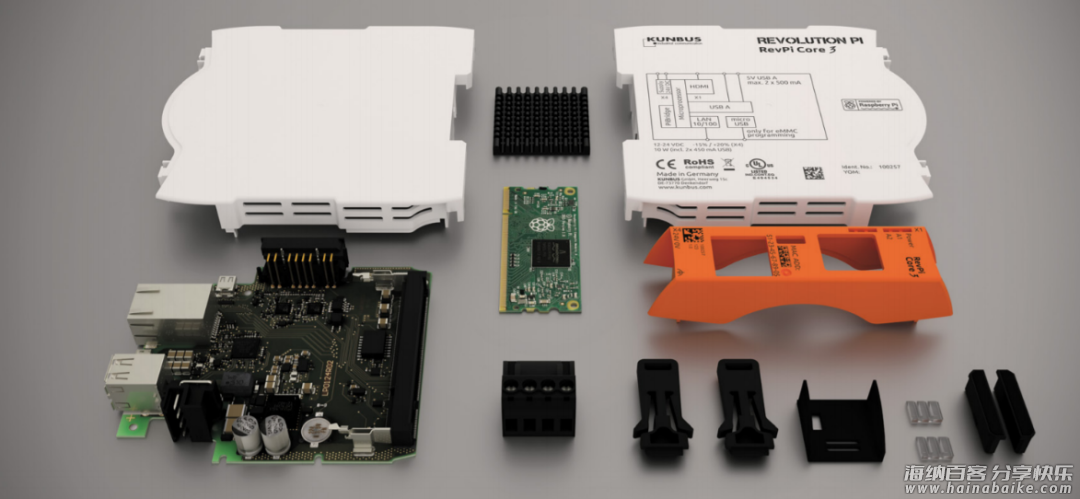
工业树莓派Revolution Pi(简称RevPi)是基于Raspberry Pi 扩展而成的工业PC。该系列的三个基本模块都安装在细长的DIN导轨外壳中,可以通过各种合适的I/O模块和现场总线网关进行无缝扩展,并可通过预置的图形配置工具轻松配置。
为了实现符合EN 61131-2或IEC 61131-2标准的工业适用性,我们使用Raspberry Pi 计算模块作为基础。该模块看起来像一个内存条,但它没有任何外部接口。
我们为树莓派计算模块配备了符合所有重要工业标准的外部接口。而在软件方面,Revolution Pi具有经过特别改装的Raspbian操作系统,该操作系统配备了实时补丁,并且兼容为Raspberry Pi开发的大多数应用程序。
Node-RED简介
Node-RED 是构建物联网应用程序的一个强大工具。它使用可视化编程方法,允许开发人员将预定义的代码块(称为“节点”,Node)连接起来执行任务。连接的节点,通常是输入节点、处理节点和输出节点的组合,当它们连接在一起时,构成一个“流”(Flows)。
Node-RED最初是IBM在2013年末开发的一个开源项目,以满足他们快速连接硬件和设备到Web服务和其他软件的需求。作为物联网的一种粘合剂,它很快发展成为一种通用的物联网编程工具。
重要的是,Node-RED已经积累大量用户并迅速形成了一个活跃的开发人员社区,他们可以开发新的节点,同时允许程序员复用Node-RED代码来完成各种各样的任务。
RevPi已经预安装好了Node-RED编程环境,用户可以直接使用。并且我们有专门为RevPi设计的节点提供使用。Node-RED将成为您快速开发物联网应用的强大工具!

标签: 虹科









评论列表